
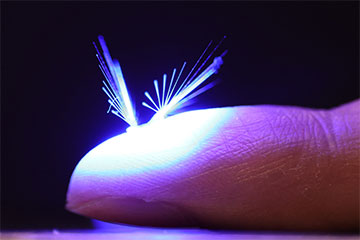
The researchers’ artificial fairy was inspired by dandelion seeds. [Image: J. Yang / Tampere University]
In much of North America, the perennial herb known as dandelion has a reputation as a ubiquitous but unsavory weed. Dandelion has the ability to spread far and wide by using updrafts and winds, across a range of over 100 kilometers, due to the architecture of its white, tufted seed.
Inspired by the humble dandelion seed, researchers in Finland and Germany have created a light-controlled, soft-bodied robot capable of wind-assisted dispersal and lift-off and landing actions (Adv. Sci., doi: 10.1002/advs.202206752). The wirelessly controlled, miniaturized device, which has the ability to passively navigate over a large aerial space, has potential applications for sensing and other functions in harsh or hazardous environments.
Taking inspiration from nature
Responsive polymer allows the creation of artificial, autonomously operating structures. In dark and calm weather, the “fairy” stays still. When there is enough light, the structure opens automatically, allowing it to fly in the wind flow. [Image: J. Yang / Tampere University] [Enlarge image]
Hao Zeng, leader of the Light Robots group at Tampere University, Finland, has been working on systems based on light-driven smart materials for several years. His laboratory has leveraged the programmable deformation of stimuli-responsive, shape-morphing polymers to make robots that can walk and even swim. In the new work, Zeng and his colleagues aimed to tackle a frontier not yet achieved by responsive material research: flight.
“One day we thought that [the earlier projects] are not exciting anymore, we want something more challenging,” he said. “That is why we have started this project, called FAIRY.” The goal of FAIRY, which stands for Flying Aero-robots based on Light Responsive Materials Assembly, is to develop small-scale, light-driven flying robots with adaptive features inspired by biological organisms.
The first design, which mimics the structure of the dandelion seed, consists of a light-driven soft actuator surrounded by bristly filaments in a circular configuration. The actuator, made of a liquid crystal elastomer, absorbs visible light energy (from a 532-nm solid-state laser or a 460-nm LED source) and transfers it to heat. The thermal expansion anisotropy of the material causes it to bend, thereby opening or closing the bristles to facilitate flight.
Takeoff and landing
The robot has several biomimetic features, including high porosity, a lightweight structure (1.2 mg) and separated vortex-ring formation in the presence of wind, which is crucial for passive dispersal to occur. Both the artificial and natural dandelion seeds have terminal free-falling velocity of around 0.5 m/s.
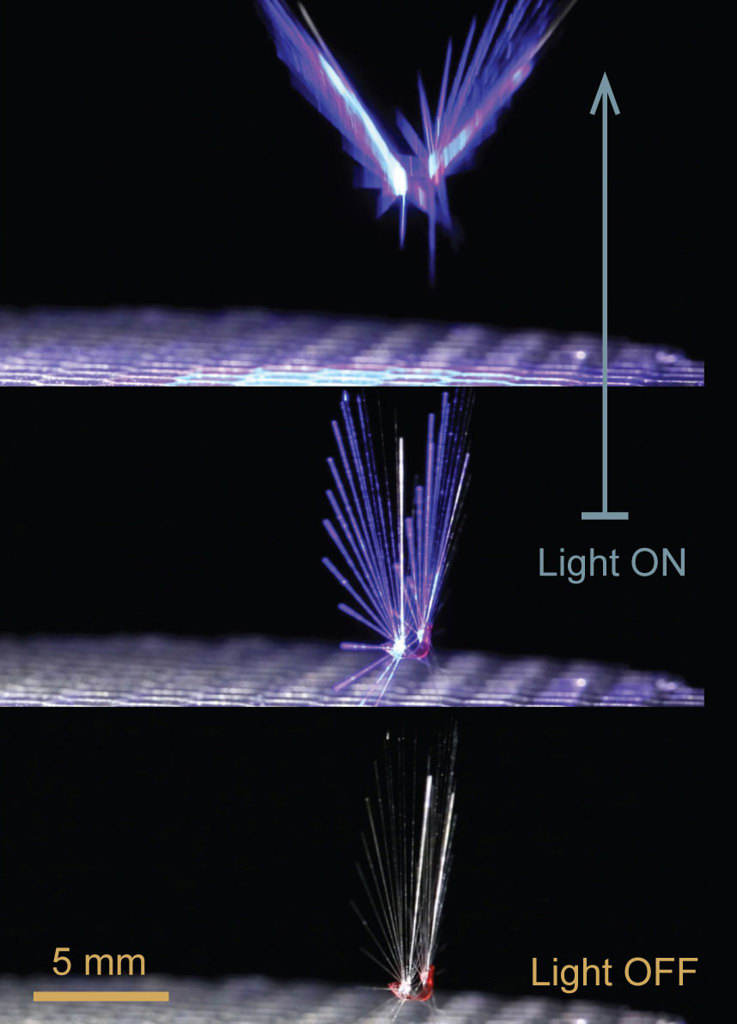
Zeng and his colleagues demonstrated wind-assisted lift-off and landing actions with the robot in a wind tunnel. A folded structure requires a higher wind speed to initiate liftoff compared with an unfolded one. They placed a light-folded device into the wind tunnel and turned off the light, and the robot quickly unfolded and took off. By changing the bending direction of the actuator, the mechanism could also work in reverse—as in, light “on” to disperse and light “off” to land.
As an even more ambitious goal for their next robot design, the researchers wish to mimic more complex flying species with wings, such as butterflies and birds.
“Consider the simplest step in natural flying species: flapping the wing to take off. Can we reproduce this in inanimate material?” Zeng said. “To achieve this will be a big progress in the research of microrobot and smart materials, and it will be the next step of our research.”
